पुढील लेखात आपण CloudCompare वर एक नजर टाकणार आहोत. हे आहे एक 3D पॉइंट क्लाउड आणि त्रिकोणी जाळी प्रक्रिया सॉफ्टवेअर. या अनुप्रयोगाचा उद्देश दोन दाट 3 डी बिंदू ढगांची तुलना करणे आहे, जसे की लेसर स्कॅनरद्वारे मिळवलेले. शिवाय, हे पॉइंट क्लाउड आणि त्रिकोणी जाळीची तुलना करण्यासाठी देखील डिझाइन केले आहे. CloudCompare आणि ccViewer सध्या Gnu/Linux, Windows आणि macOS सिस्टीमवर चालतात. हा कार्यक्रम GNU जनरल पब्लिक लायसन्स (GPL), त्यामुळे वापरकर्ता कोणत्याही हेतूसाठी त्यांचा वापर करण्यास मोकळा आहे.
अद्यतनांद्वारे, CloudCompare बनले आहे अनेक प्रगत अल्गोरिदमसह अधिक जेनेरिक पॉइंट क्लाउड प्रोसेसिंग सॉफ्टवेअर जसे: आरलॉगिंग, रिसॅम्पलिंग, रंग / सामान्य / स्केलर फील्ड मॅनिप्युलेशन, सांख्यिकीय संगणन, सेन्सर व्यवस्थापन, परस्पर किंवा स्वयंचलित लक्ष्यीकरण, व्हिज्युअलायझेशन एन्हांसमेंट. आणि आणखी काही.
हा कार्यक्रम मूलतः Telecom ParisTech आणि EDF च्या R&D विभागाच्या सहकार्यादरम्यान तयार करण्यात आला होता. CloudCompare प्रकल्पाची सुरुवात 2003 मध्ये 3D भौमितिक डेटामधील चेंज डिटेक्शन या विषयावर डॅनियल गिरार्डेउ-मॉनटॉट यांच्या PhD सह झाली. त्या वेळी, औद्योगिक सुविधा किंवा बांधकाम साइट्सवर लेसर स्कॅनरसह अधिग्रहित उच्च-घनतेच्या 3D पॉइंट क्लाउडमधील बदल जलदपणे शोधणे हा त्याचा प्राथमिक उद्देश होता. ते नंतर अधिक सामान्य आणि प्रगत 3D डेटा प्रोसेसिंग सॉफ्टवेअरमध्ये विकसित झाले. आता हा एक स्वतंत्र ओपन सोर्स प्रकल्प आणि विनामूल्य सॉफ्टवेअर आहे.
सामान्य क्लाउड तुलना वैशिष्ट्ये

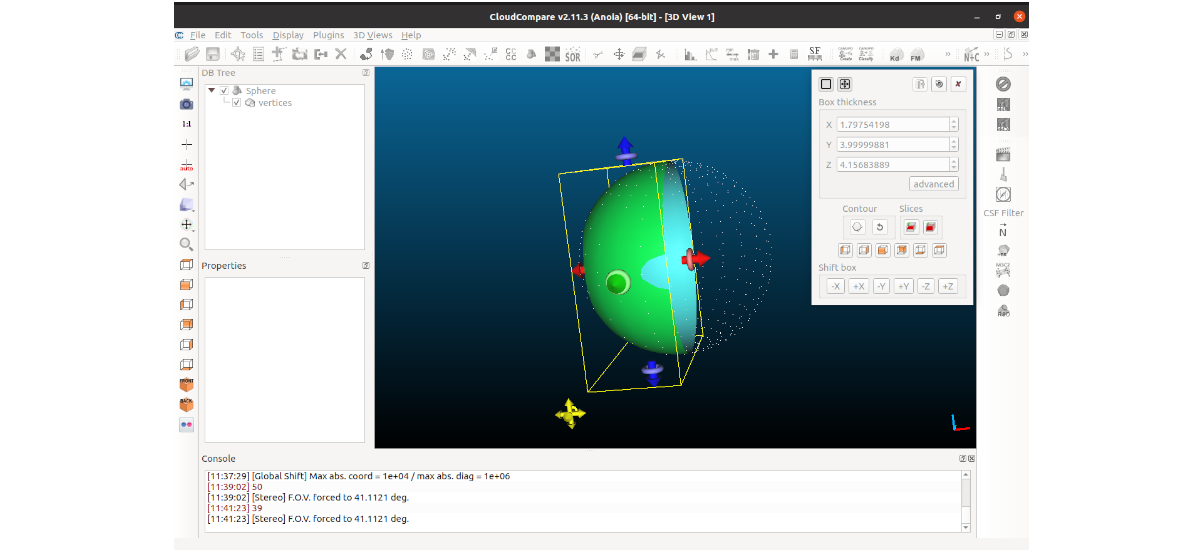
- CloudCompare प्रदान करते थ्रीडी पॉइंट क्लाउड आणि त्रिकोण मेशेस व्यक्तिचलितपणे संपादित आणि प्रस्तुत करण्यासाठी मूलभूत साधनांचा संच. हे कार्य करण्याच्या पद्धतींसह अनेक प्रगत प्रक्रिया अल्गोरिदम देखील ऑफर करते:
-
- अंदाज (अनरोलिंग अक्ष, सिलेंडर किंवा शंकूवर आधारित, ...)
- विक्रम (आयसीपी, ...)
- अंतर गणना (मेघ-ढग किंवा मेघ-जाळी जवळच्या शेजाऱ्यापासून अंतर, ...)
- सांख्यिकीय गणना (अवकाशीय चाचणी चि-चौरस, ...)
- विभाजन (अग्रेषित प्रसारावर आधारित, कनेक्ट केलेल्या घटकांचे लेबलिंग, ...)
- भौमितिक वैशिष्ट्यांचा अंदाज (घनता, वक्रता, खडबडीतपणा, भूगर्भीय विमानाचे अभिमुखता, ...)
- CloudCompare प्रत्येक पॉइंट क्लाउडवर अमर्यादित स्केलर फील्ड हाताळू शकते ज्यावर विविध समर्पित अल्गोरिदम लागू केले जाऊ शकतात (स्मूथिंग, ग्रेडियंट मूल्यांकन, आकडेवारी इ.). डायनॅमिक रंग पुनरुत्पादन प्रणाली वापरकर्त्याला प्रति बिंदू स्केलर फील्ड कार्यक्षम मार्गाने दृश्यमान करण्यात मदत करते.
- वापरकर्ता परस्पर 3D घटकांचे विभाजन करण्यास सक्षम असेल (स्क्रीनवर काढलेल्या 2D पॉलीलाइनसह), इतरांच्या संबंधात एक किंवा अधिक घटक परस्परसंवादीपणे फिरवा / अनुवादित करा, परस्पररित्या एकल बिंदू किंवा बिंदूंच्या जोडी निवडा (संबंधित विभागाची लांबी मिळवण्यासाठी) किंवा बिंदू तिप्पट (सामान्यतेशी संबंधित कोन आणि विमान प्राप्त करण्यासाठी). नवीनतम आवृत्ती बिंदू किंवा आयताकृती क्षेत्रांच्या भाष्यांना संलग्न 2D लेबले तयार करण्यास देखील समर्थन देते.
- प्लग-इन यंत्रणा CloudCompare च्या क्षमतांचा आणखी विस्तार करण्यास सक्षम करते.
उबंटूवर CloudCompare स्थापित करा
उबंटूवर CloudCompare स्थापित करण्यासाठी, वापरकर्ते फ्लॅटपॅक पॅकेज वापरू शकतात ज्यामध्ये आढळू शकते फ्लॅटहब. आपण उबंटू 20.04 वापरत असल्यास आणि आपल्या सिस्टमवर अद्याप हे तंत्रज्ञान सक्षम केलेले नसल्यास आपण सुरू ठेवू शकता मार्गदर्शक की या सहयोगीने या ब्लॉगवर काही काळापूर्वी लिहिले आहे.
जेव्हा तुम्ही तुमच्या कॉम्प्युटरवर या प्रकारचा ऍप्लिकेशन इन्स्टॉल करू शकता, तेव्हा तुम्हाला फक्त टर्मिनल (Ctrl + Alt + T) उघडावे लागेल आणि खालील चालवावे लागेल कमांड इन्स्टॉल करा:
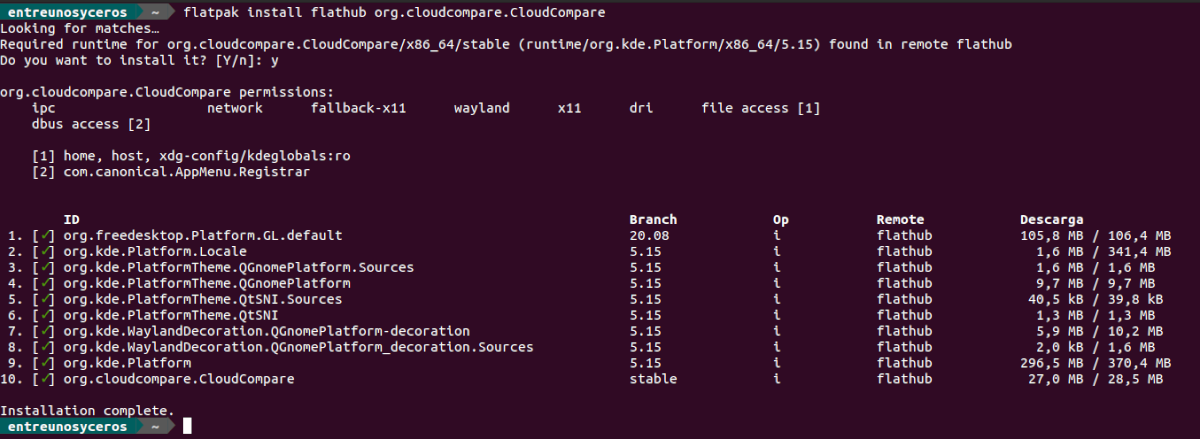
flatpak install flathub org.cloudcompare.CloudCompare
एकदा इंस्टॉलेशन पूर्ण झाल्यावर, आपण हे करू शकता कार्यक्रम सुरू करा आमच्या संगणकावर त्याचे संबंधित लाँचर शोधत आहे, जरी टर्मिनलमध्ये आज्ञा देखील लिहिली जाऊ शकते:

flatpak run org.cloudcompare.CloudCompare
विस्थापित करा
परिच्छेद हा कार्यक्रम काढा, फक्त टर्मिनल (Ctrl + Alt + T) उघडणे आणि त्यामध्ये खालील कमांड कार्यान्वित करणे आवश्यक आहे:

flatpak uninstall org.cloudcompare.CloudCompare
CloudCompare हे मोफत सॉफ्टवेअर आहे (सॉफ्टवेअरसाठी पैसे देणे बंधनकारक नसले तरी, त्याचे विकसक ते उपयुक्त मानणाऱ्या वापरकर्त्यांच्या देणग्यांचे स्वागत करतात). कोणत्याही प्रश्नासाठी, बग अहवालासाठी किंवा सूचनेसाठी, वापरकर्ते करू शकतात तपासून पहा प्रकल्प मंच, येथे त्याचे भांडार जिथूब किंवा प्रकल्प वेबसाइट.