在下一篇文章中,我们将看看 CloudCompare。 这是 一个3D点云和三角网格处理软件. 此应用程序的目的是对两个密集的 3D 点云(例如使用激光扫描仪获取的点云)进行比较。 此外,它还旨在比较点云和三角形网格。 CloudCompare 和 ccViewer 目前在 Gnu/Linux、Windows 和 macOS 系统上运行。 该程序是在 GNU 通用公共许可证下发布的(GPL),因此用户可以出于任何目的自由使用它们。
通过更新,CloudCompare 已成为 更通用的点云处理软件,包括许多高级算法 喜欢:r记录、重采样、颜色/法线/标量场操作、统计计算、传感器管理、交互式或自动瞄准、可视化增强。 还有一些。
该计划最初是在 Telecom ParisTech 和 EDF 的研发部门合作期间创建的。 CloudCompare 项目始于 2003 年,丹尼尔·吉拉多-蒙托 (Daniel Girardeau-Montaut) 获得了 3D 几何数据中的变化检测博士学位。 当时,其主要目的是快速检测在工业设施或建筑工地使用激光扫描仪获取的高密度 3D 点云的变化。 它后来演变成更通用和更先进的 3D 数据处理软件。 现在 是一个独立的开源项目和免费软件.
通用 CloudCompare 功能

- CloudCompare 提供 一组用于手动编辑和渲染 3D 点云和三角形网格的基本工具. 它还提供了几种高级处理算法,包括执行以下操作的方法:
-
- 预测 (基于展开轴、圆柱体或圆锥体,...)
- 注册表(ICP, ...)
- 距离计算(cloud-cloud 或 cloud-mesh 与最近邻居的距离,...)
- 统计计算(空间测试 卡方,...)
- 分割(连接组件的标记,基于前向传播,...)
- 几何特征的估计(密度,曲率,粗糙度,地质平面的方向,......)
- CloudCompare 可以处理每个可以应用各种专用算法的点云的无限标量字段(平滑、梯度评估、统计等。)。 动态色彩再现系统可帮助用户以有效的方式可视化每个点的标量场。
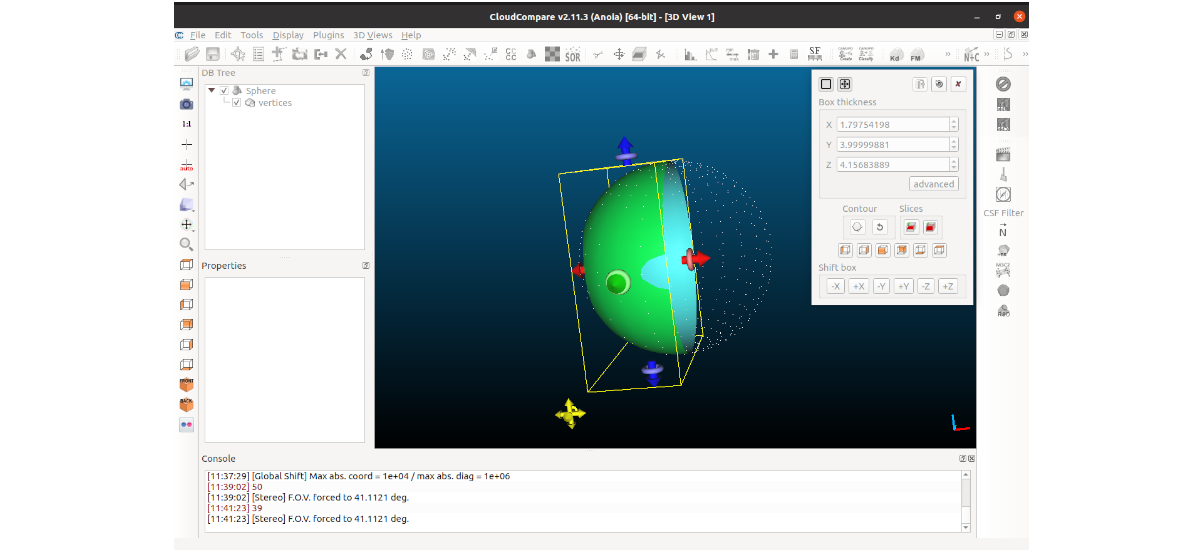
- 用户将能够交互式地分割 3D 实体(用在屏幕上绘制的 2D 折线),交互地旋转/平移一个或多个实体,交互地选择单个点或点对 (获取相应段的长度) 或点三元组 (得到法线对应的角度和平面)。 最新版本还支持创建附加到点的二维标签或矩形区域的注释。
- 插件机制可以进一步扩展 CloudCompare 的功能。
在 Ubuntu 上安装 CloudCompare
要在 Ubuntu 上安装 CloudCompare, 用户可以使用可以在以下位置找到的 Flatpak 包 平面枢纽. 如果您使用 Ubuntu 20.04 并且您的系统上仍未启用此技术,则可以继续 导游 一位同事不久前在此博客上写道。
当您可以在计算机上安装此类应用程序时,您只需打开一个终端(Ctrl + Alt + T)并运行以下命令 安装命令:
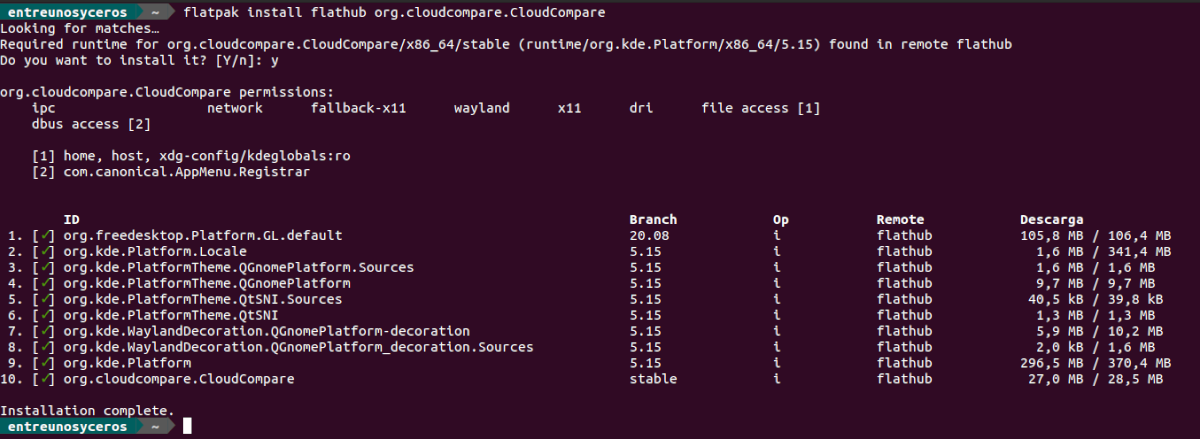
flatpak install flathub org.cloudcompare.CloudCompare
安装完成后,您可以 启动程序 在我们的电脑上寻找它对应的启动器,虽然命令也可以写在终端中:

flatpak run org.cloudcompare.CloudCompare
卸载
至 删除该程序,只需要打开一个终端(Ctrl+Alt+T),在里面执行如下命令:

flatpak uninstall org.cloudcompare.CloudCompare
CloudCompare 是免费软件(虽然软件不是强制性的,但它的开发者欢迎那些认为它有用的用户的捐赠)。 对于任何问题、错误报告或建议,用户可以 咨询 项目论坛,其存储库位于 Github上 或 项目网站.