
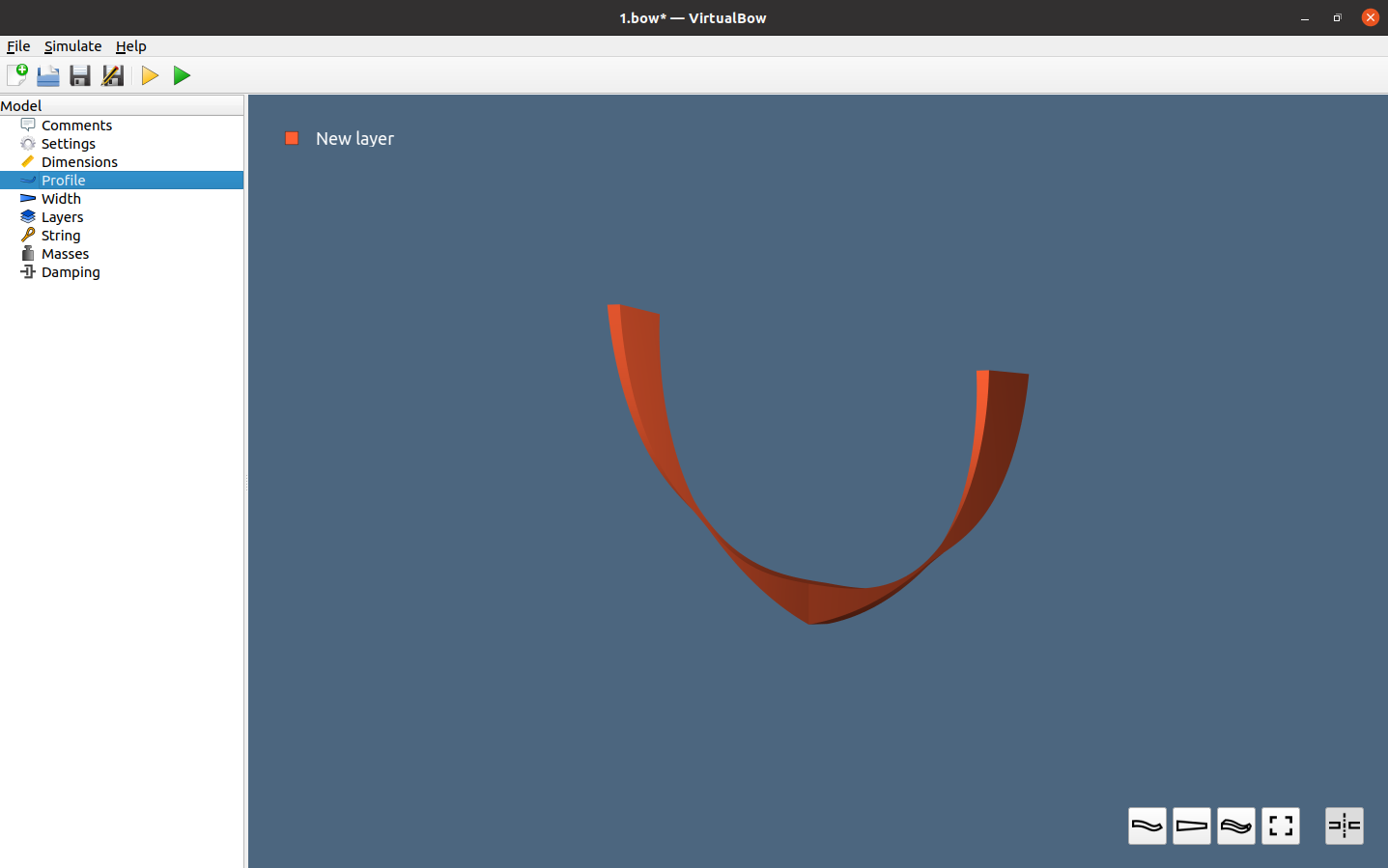
Seuraavassa artikkelissa aiomme tarkastella VirtualBow. Tämä on yksi ilmainen ja avoimen lähdekoodin sovellus kaaren suunnitteluun ja simulointiin Gnu / Linuxille, Windowsille ja MacOS: lle. Sen avulla käyttäjät voivat suunnitella ja simuloida kaaria. VirtualBow on kirjoitettu C ++: lla ja käyttää Qt-käyttöliittymäkehystä. Lähdekoodia isännöidään osoitteessa GitHub. Sovellus julkaistaan GNU General Public License v3.0 -käyttöjärjestelmällä.
Tämä ohjelma tarjoaa käyttäjille helpon tavan testata ja optimoida suunnittelunsa antamalla melkein välitöntä palautetta kaaren odotetusta suorituskyvystä. Simulointitulokset sisältävät erilaisia kaaren staattisia ja dynaamisia ominaisuuksiakuten vetokoe, raajan muodonmuutos, jännitykset, nuolen nopeus ja hyötysuhde.
Virtualbowin yleiset ominaisuudet
- Se on ilmainen ja avoimen lähdekoodin ohjelma, joka on julkaistu GNU v3.0 General Public License -lisenssillä. Se on ilmainen käyttää, muokata ja jakaa uudelleen. Kuka tahansa voi osallistua kehitykseen.
- Ohjelmassa on mallieditori, jolla voimme luoda, ladata ja tallentaa kaarimalleja.
- Voimme muokkaa tasoja, materiaalin ominaisuuksia ja muita parametreja.
- Pystymme myös suorittaa kaaren staattisen ja dynaamisen simulointi.
- Käytä äärellinen elementtimenetelmä (MEF)
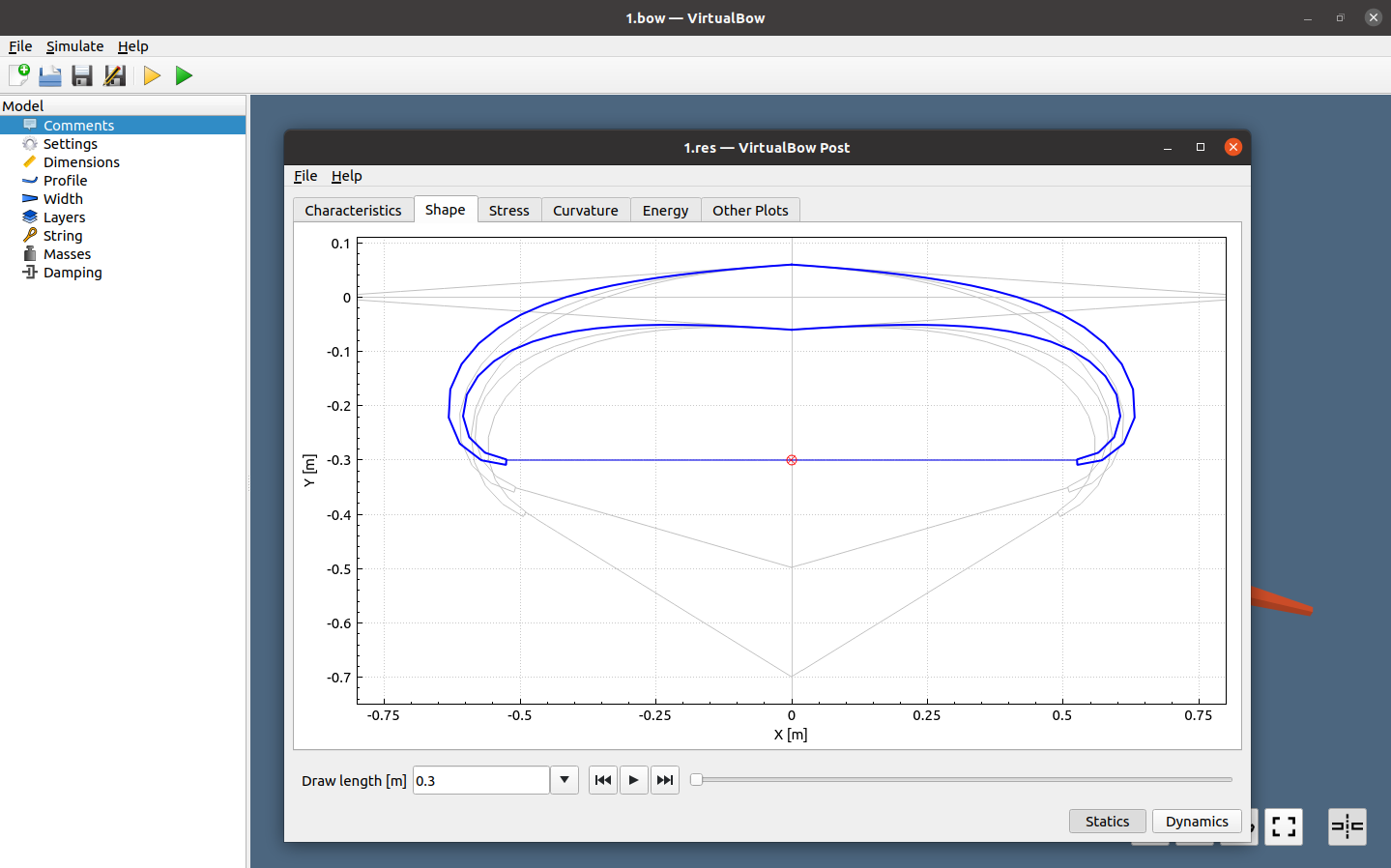
- Sisältää a tulosten katseluohjelma jossa voimme kuulla staattiset tulokset; raajojen muodot, käyrän piirtäminen, varastoitu energia tai jännitysjakauma. vuonna dynaamisia tuloksia voimme kuulla; köyden ja nuolen sijainti, nopeus ja kiihtyvyys, liike- ja potentiaalienergia, hyötysuhde tai komentoriviliitäntä.
- Meillä on mahdollisuus suorittaa simulaatioita komentoriviltä.
- Voimme soita VirtualBow muilta ohjelmilta / skripteiltä suorittaa parametritutkimuksia ja suunnittelun optimointeja.
- Ohjelma on täysin dokumentoitu. Käyttäjillä on mahdollisuus tutustua Käyttöohje, jossa kaikki ohjelman toiminnot on selitetty ja auttaa meitä pääsemään alkuun ja Teoreettinen käsikirja, josta voimme löytää yksityiskohtaisen dokumentaation sisäisistä simulointimenetelmistä.
Nämä ovat vain joitain ohjelman ominaisuuksia. He voivat ota yhteyttä kaikkiin heihin projektin verkkosivusto.
Asenna VirtualBow Ubuntuun
VirtualBow on saatavana natiivina deb-tiedostomuotona Ubuntulle, jonka löydämme saatavilla projektin julkaisusivu GitHubissa. Tiedoston, jonka aiomme ladata tänään, on oltava nimeltään «virtualbow-0.7.1-linux64.deb ».
Voit ladata tämän ohjelman .deb-paketin verkkoselaimen lisäksi voimme avata päätelaitteen (Ctrl + Alt + T) ja käyttää wgetiä seuraavasti ladataksesi paketin:
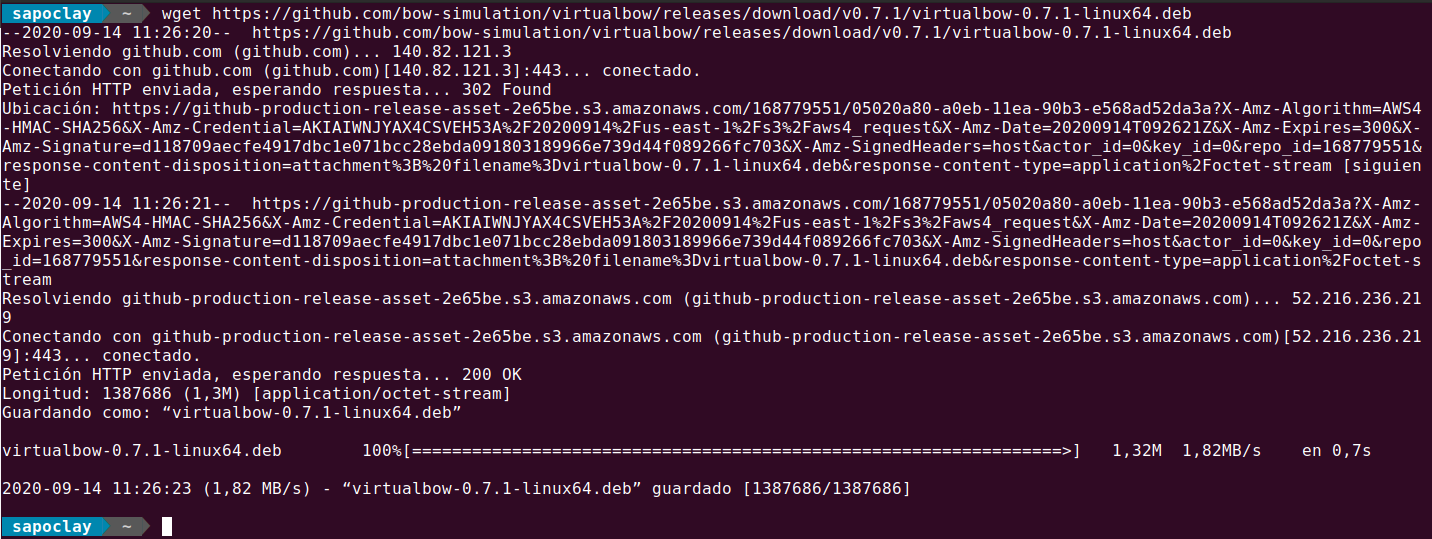
wget https://github.com/bow-simulation/virtualbow/releases/download/v0.7.1/virtualbow-0.7.1-linux64.deb
Kun lataus on valmis, samasta päätelaitteesta aiomme suorittaa seuraavat komennot Asenna ohjelma:
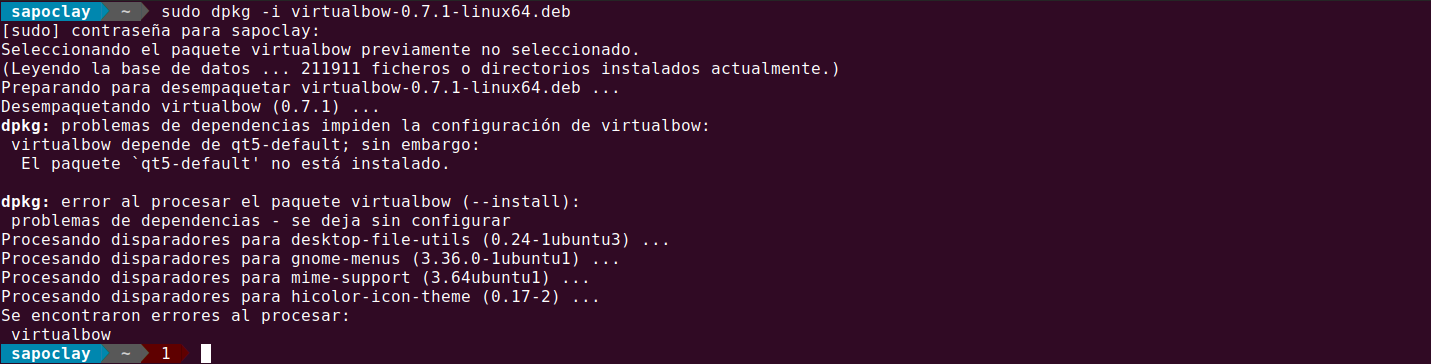
sudo dpkg -i virtualbow-0.7.1-linux64.deb
Jos ne näkyvät riippuvuuksien ongelmat kuten ne, jotka voidaan nähdä edellisessä kuvakaappauksessa, voimme ratkaista ne kirjoittamalla samaan terminaaliin tämän toisen komennon:
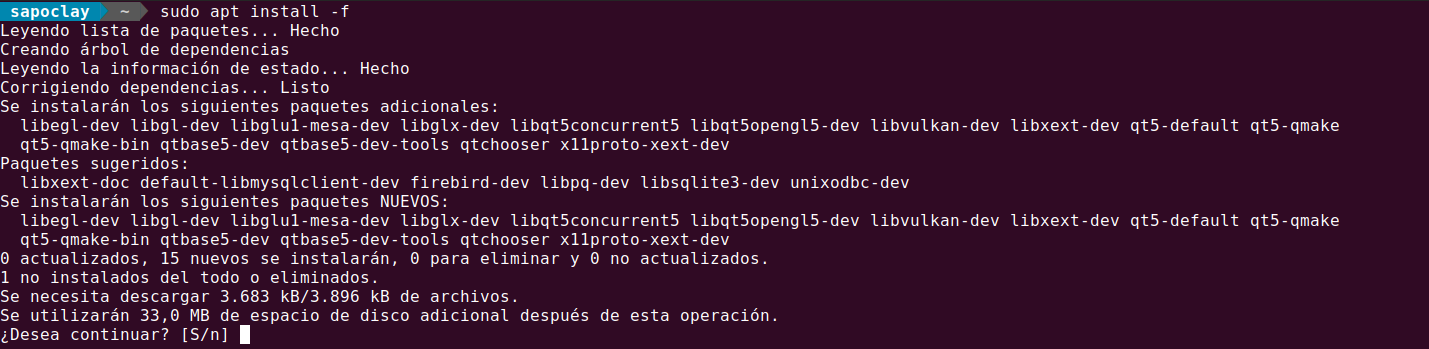
sudo apt install -f
Kun asennus on valmis, voimme käynnistää ohjelman etsimällä ohjelman käynnistysohjelmaa tietokoneeltamme.

uninstall
että poista tämä ohjelma tiimistämme, meidän on vain avattava pääte (Ctrl + Alt + T) ja suoritettava seuraava komento:

sudo apt remove virtualbow; sudo apt autoremove
Projektin luojat varoittavat, että simulointitulosten validointi on erittäin tärkeä asia. Joten jos tätä ohjelmaa on käytetty olemassa olevan kaaren suunnitteluun tai mallintamiseen, luojat pyytävät meitä ilmoittamaan heille simulaation ja todellisuuden erot ja yhtäläisyydet.
Sivusto osoittaa myös, että monia muita simulointituloksia on vaikea mitata, kuten materiaalin rasituksia. Siksi, joku, jolla on pääsy edistyneisiin mittauslaitteisiin (esimerkiksi kiihtyvyysanturit, nopea kamera jne.) olisi suuri apu tähän projektiin.
He ilmoittavat verkkosivustollaan myös, että käyttäjien on otettava tämä huomioon tämä ohjelmisto on edelleen kehittymätön, joten ne suosittelevat, että ei pidä luottaa liikaa tuloksiinja ne kannustavat meitä ilmoittamaan löytämistämme virheistä. Lisätietoja ohjelmasta käyttäjät voivat kääntyä projektin verkkosivusto ja siellä olevat asiakirjat.