
હવે પછીના લેખમાં આપણે વર્ચ્યુઅલ બો પર એક નજર નાખીશું. આ એક છે Gnu / Linux, Windows અને MacOS માટે આર્ક ડિઝાઇન અને સિમ્યુલેશન માટે મફત અને ખુલ્લા સ્રોત એપ્લિકેશન. તેની મદદથી, વપરાશકર્તાઓ કમાનો ડિઝાઇન અને અનુકરણ કરી શકશે. વર્ચ્યુઅલ બો C ++ માં લખાયેલ છે અને Qt GUI ફ્રેમવર્કનો ઉપયોગ કરે છે. સ્રોત કોડ હોસ્ટ થયેલ છે GitHub. એપ્લિકેશન GNU જનરલ પબ્લિક લાઇસન્સ v3.0 હેઠળ પ્રકાશિત થાય છે.
આ પ્રોગ્રામ વપરાશકર્તાઓને આર્કની અપેક્ષિત કામગીરી વિશે લગભગ ત્વરિત પ્રતિક્રિયા આપીને તેમની ડિઝાઇનની ચકાસણી અને optimપ્ટિમાઇઝ કરવાની સરળ રીત પ્રદાન કરે છે. સિમ્યુલેશન પરિણામોમાં આર્કની વિવિધ સ્થિર અને ગતિશીલ લાક્ષણિકતાઓ શામેલ છેજેમ કે ટેન્સિલ ટેસ્ટ, અંગ વિકૃતિ, તાણ, તીર ગતિ અને કાર્યક્ષમતાની ડિગ્રી.
વર્ચ્યુઅલબોની સામાન્ય સુવિધાઓ
- તે GNU v3.0 જનરલ પબ્લિક લાઇસન્સ હેઠળ પ્રકાશિત એક મફત અને ખુલ્લા સ્રોત પ્રોગ્રામ છે. તે વાપરવા, સુધારવા અને ફરીથી વહેંચવા માટે મફત છે. કોઈપણ વિકાસમાં જોડાઈ શકે છે.
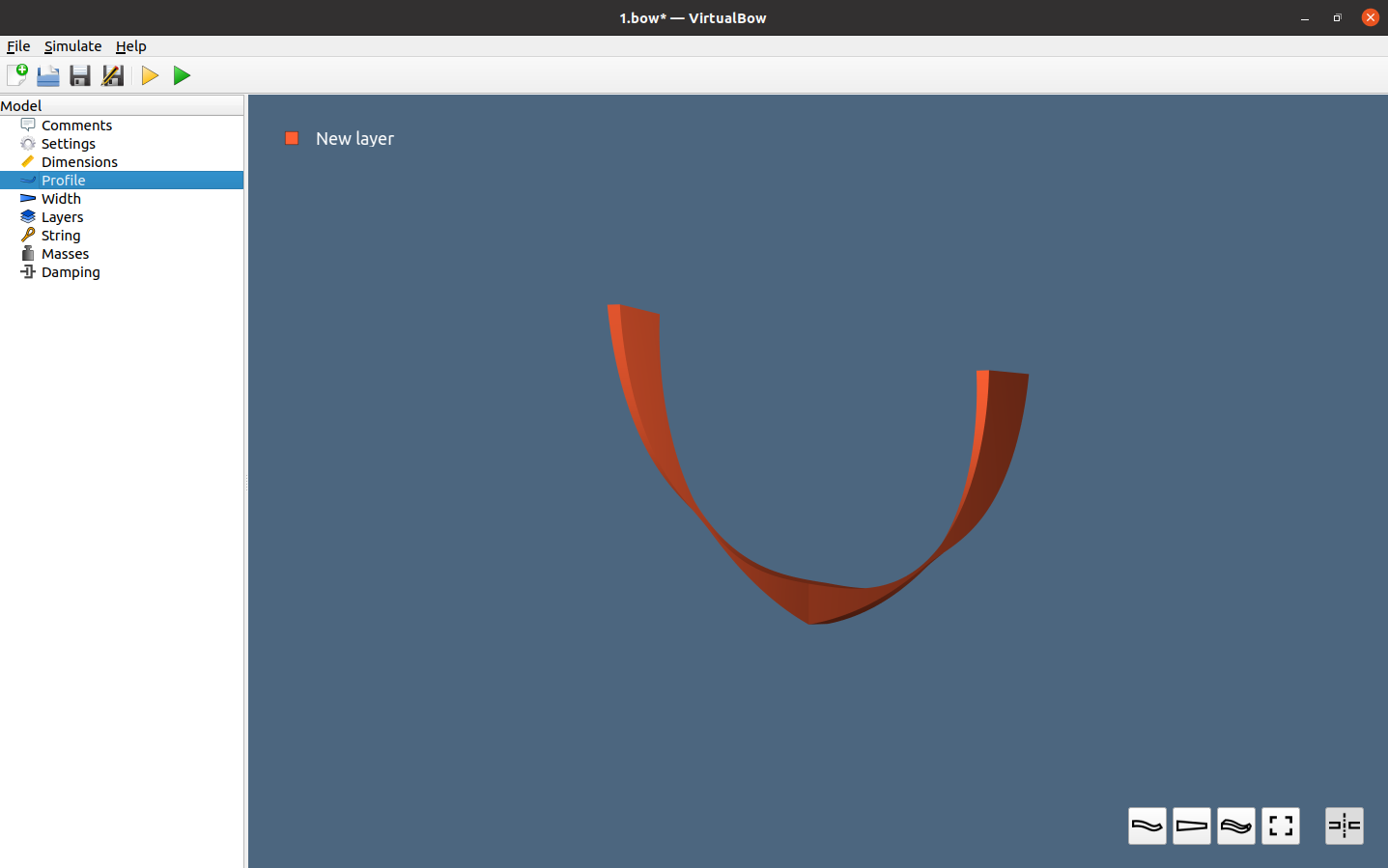
- પ્રોગ્રામ એ મોડેલ એડિટર કે જેની સાથે આપણે આર્ક મ modelsડેલો બનાવી શકીએ છીએ, લોડ કરી શકીએ છીએ.
- આપણે કરી શકીએ સ્તરો, સામગ્રી ગુણધર્મો અને અન્ય પરિમાણો સંપાદિત કરો.
- અમે પણ સમર્થ હશો આર્ક સ્ટેટિક્સ અને ગતિશીલતાનું અનુકરણ કરો.
- વાપરો મર્યાદિત તત્વ પદ્ધતિ (MEF)
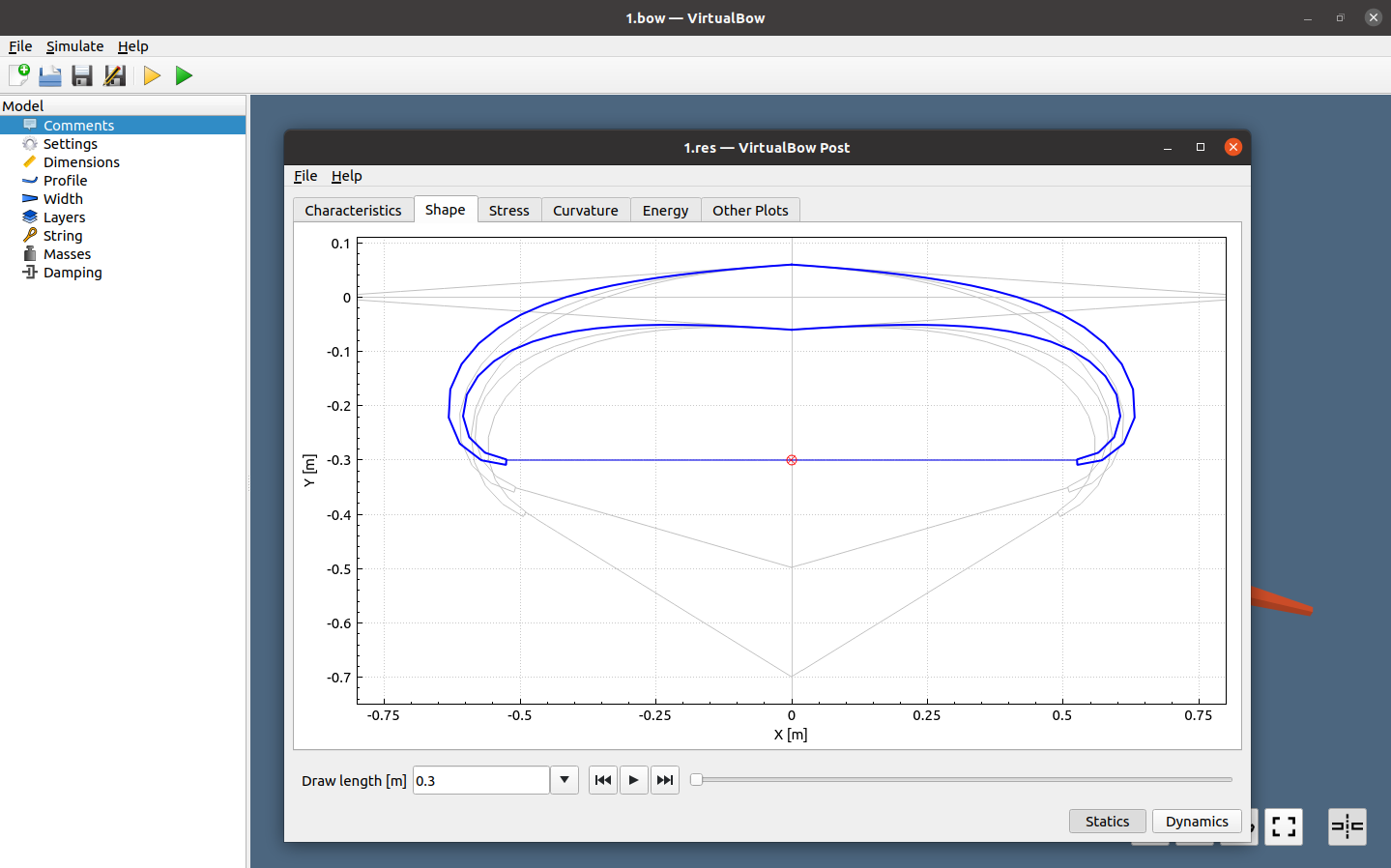
- સમાવે છે એ પરિણામો દર્શક જેમાં આપણે સલાહ લઈ શકીએ છીએ સ્થિર પરિણામો; અંગના આકાર, વળાંક દોરવા, સંગ્રહિત energyર્જા અથવા તાણનું વિતરણ. માં ગતિશીલ પરિણામો અમે સલાહ લઈ શકીએ છીએ; દોરડા અને તીર, ગતિ અને સંભવિત energyર્જા, કાર્યક્ષમતાની ડિગ્રી અથવા કમાન્ડ લાઇન ઇન્ટરફેસની સ્થિતિ, ગતિ અને પ્રવેગક.
- અમે શક્યતા હશે આદેશ વાક્યમાંથી સમાનતાઓ ચલાવો.
- આપણે કરી શકીએ અન્ય પ્રોગ્રામ્સ / સ્ક્રિપ્ટોથી વર્ચ્યુઅલ બોને ક callલ કરો પરિમાણ અભ્યાસ અને ડિઝાઇન optimપ્ટિમાઇઝેશન કરવા માટે.
- પ્રોગ્રામ સંપૂર્ણ દસ્તાવેજીકરણ થયેલ છે. વપરાશકર્તાઓની સલાહ લેવાની સંભાવના હશે વપરાશકર્તા માર્ગદર્શિકા, જ્યાં પ્રોગ્રામના તમામ કાર્યો સમજાવાયેલ છે અને પ્રારંભ કરવામાં અને અમને મદદ કરશે સૈદ્ધાંતિક માર્ગદર્શિકા, જેમાં આપણે આંતરિક સિમ્યુલેશન પદ્ધતિઓનું વિગતવાર દસ્તાવેજીકરણ શોધી શકીએ છીએ.
આ પ્રોગ્રામની કેટલીક સુવિધાઓ છે. તેઓ કરી શકે છે માં બધા સાથે સંપર્ક કરો પ્રોજેક્ટ વેબસાઇટ.
ઉબુન્ટુ પર વર્ચ્યુઅલ બો સ્થાપિત કરો
વર્ચ્યુઅલ બો ઉબુન્ટુ માટે મૂળ ડેબ ફાઇલ ફોર્મેટ તરીકે ઉપલબ્ધ છે, કે જે અમે ઉપલબ્ધ મળશે પ્રોજેક્ટ પ્રકાશન પાનું GitHub પર. આજે આપણે જે ફાઇલ ડાઉનલોડ કરવા જઈ રહ્યા છીએ તેને ક calledલ કરવું આવશ્યક છે «વર્ચ્યુઅલબો-0.7.1-linux64.deb.
આ પ્રોગ્રામના .deb પેકેજને ડાઉનલોડ કરવા માટે, વેબ બ્રાઉઝરનો ઉપયોગ કરવા ઉપરાંત, પણ આપણે ટર્મિનલ ખોલી શકીએ છીએ (Ctrl + Alt + T) અને વિજેટનો ઉપયોગ કરી શકીએ છીએ પેકેજ ડાઉનલોડ કરવા નીચે પ્રમાણે:
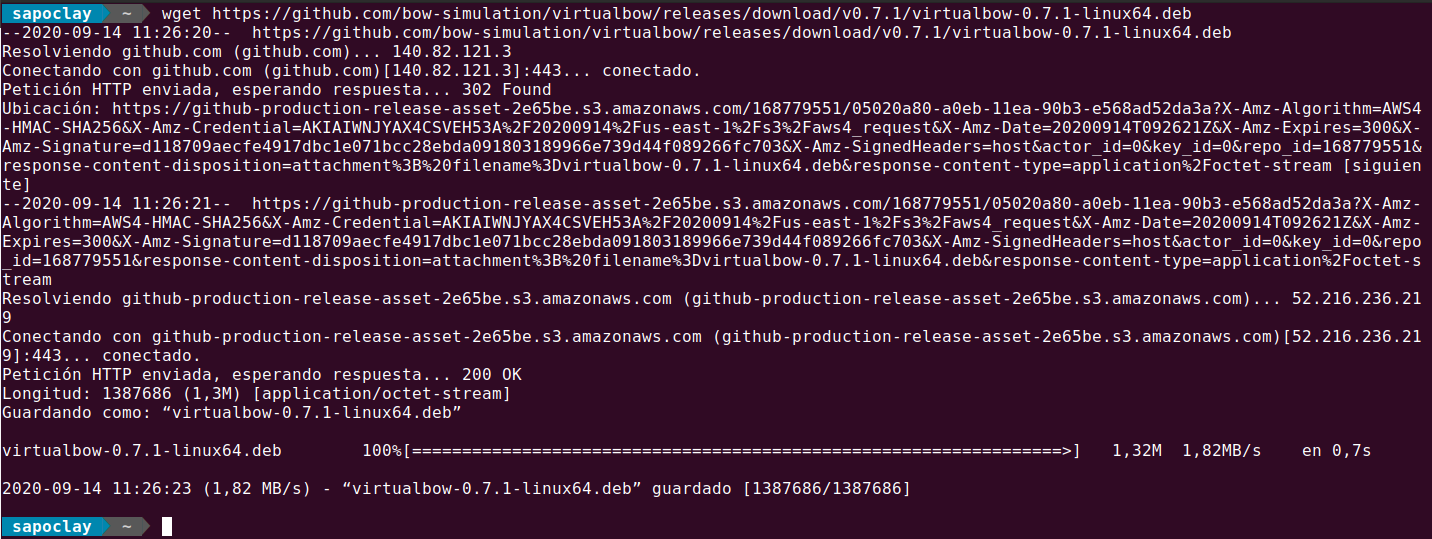
wget https://github.com/bow-simulation/virtualbow/releases/download/v0.7.1/virtualbow-0.7.1-linux64.deb
એકવાર ડાઉનલોડ સમાપ્ત થઈ જાય, તે જ ટર્મિનલમાંથી આપણે નીચે આપેલા આદેશો ચલાવીશું પ્રોગ્રામ ઇન્સ્ટોલ કરો:
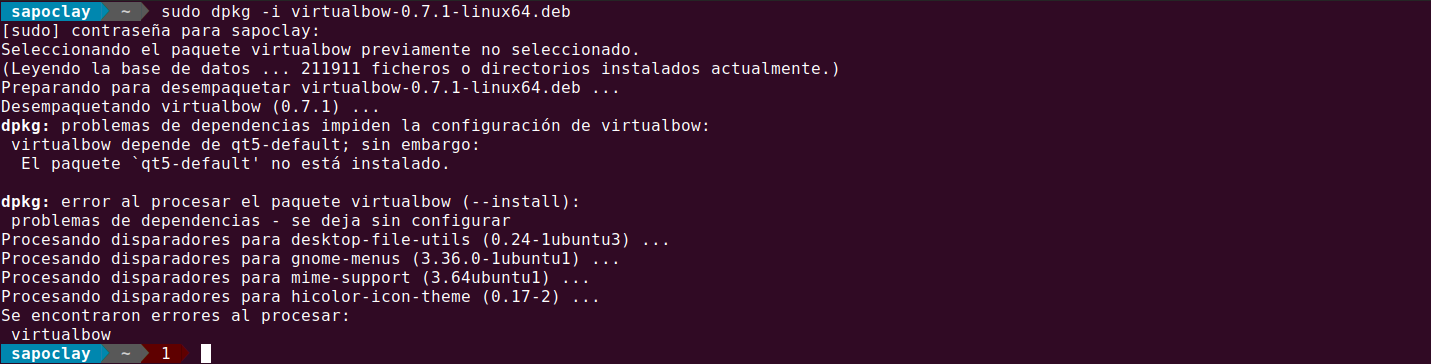
sudo dpkg -i virtualbow-0.7.1-linux64.deb
જો તેઓ દેખાય અવલંબન સાથે સમસ્યા જે પહેલાનાં સ્ક્રીનશોટમાં જોઈ શકાય છે, આપણે તે જ ટર્મિનલમાં આ અન્ય આદેશ લખીને તેને હલ કરી શકીએ છીએ:
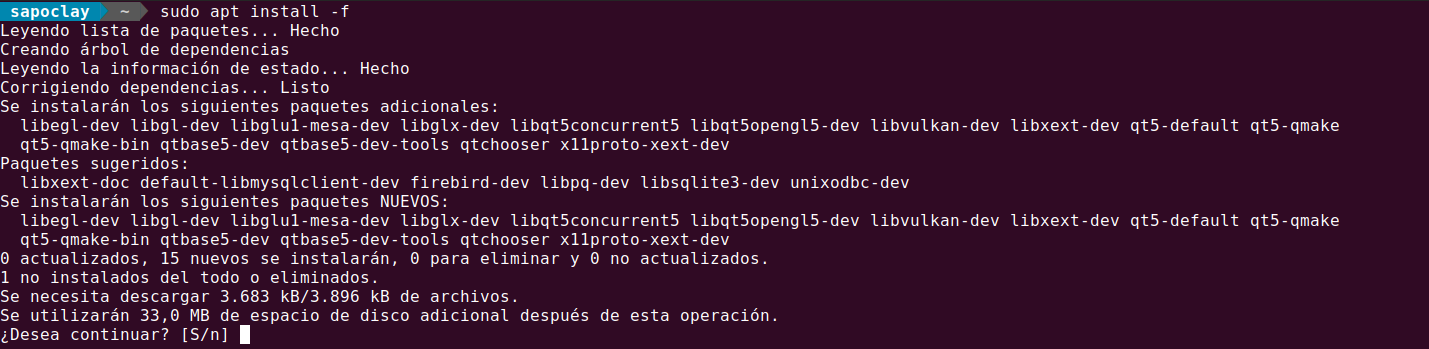
sudo apt install -f
એકવાર ઇન્સ્ટોલેશન સમાપ્ત થઈ જાય, પછી આપણે આપણા કમ્પ્યુટર પર પ્રોગ્રામ લcherંચર શોધીને પ્રોગ્રામ શરૂ કરી શકીએ.

અનઇન્સ્ટોલ કરો
પેરા અમારી ટીમમાંથી આ પ્રોગ્રામને દૂર કરો, આપણે ફક્ત ટર્મિનલ ખોલવા પડશે (Ctrl + Alt + T) અને નીચેનો આદેશ અમલમાં મૂકવો પડશે:

sudo apt remove virtualbow; sudo apt autoremove
પ્રોજેક્ટના નિર્માતાઓ ચેતવણી આપે છે કે સિમ્યુલેશન પરિણામોની માન્યતા ખૂબ જ મહત્વપૂર્ણ મુદ્દો છે. તેથી જો આ પ્રોગ્રામનો ઉપયોગ હાલના કમાનના ડિઝાઇન અથવા મોડેલ કરવા માટે કરવામાં આવ્યો છે, નિર્માતાઓ અમને સિમ્યુલેશન અને વાસ્તવિકતા વચ્ચેના તફાવતો અને સમાનતાઓ જણાવવા માટે પૂછે છે.
વેબસાઇટ પર તેઓ એ પણ સૂચવે છે કે અન્ય ઘણા સિમ્યુલેશન પરિણામોને માપવા મુશ્કેલ છે, જેમ કે સામગ્રીના તાણ. તેથી, અદ્યતન માપન સાધનોની someoneક્સેસવાળા કોઈને (પ્રવેગક સેન્સર, હાઇ-સ્પીડ ક cameraમેરો, વગેરે જેવી વસ્તુઓ.) આ પ્રોજેક્ટ માટે એક મોટી સહાયક બનશે.
તેમની વેબસાઇટ પર તેઓ એ પણ સૂચવે છે કે વપરાશકર્તાઓએ તે ધ્યાનમાં લેવું આવશ્યક છે આ સ softwareફ્ટવેર હજી અપરિપક્વ છે તેથી તેઓ પરિણામ પર વધારે આધાર રાખવાની ભલામણ કરતા નથી, અને તેઓ અમને લાગે છે તે કોઈપણ ભૂલોની જાણ કરવા પ્રોત્સાહિત કરે છે. પ્રોગ્રામ વિશે વધુ વિગતો માટે, વપરાશકર્તાઓ આ તરફ વળી શકે છે પ્રોજેક્ટ વેબસાઇટ અને દસ્તાવેજો જે ત્યાં મળી શકે છે.