
次の記事では、VirtualBowについて見ていきます。 これはXNUMXつです Gnu / Linux、Windows、MacOS向けのアーク設計とシミュレーション用の無料のオープンソースアプリケーション。 これにより、ユーザーはアーチを設計およびシミュレートできるようになります。 VirtualBowはC ++で記述されており、QtGUIフレームワークを使用します。 ソースコードはでホストされています GitHubの。 このアプリケーションは、GNU General Public Licensev3.0の下でリリースされています。
このプログラムは、アークの期待される性能に関するほぼ瞬時のフィードバックを提供することにより、設計をテストおよび最適化する簡単な方法をユーザーに提供します。 シミュレーション結果には、アークのさまざまな静的および動的特性が含まれます引張試験、手足の変形、応力、矢の速度、効率の程度など。
Virtualbowの一般的な機能
- これは、GNU v3.0 General PublicLicenseの下でリリースされた無料のオープンソースプログラムです。 使用、変更、再配布は無料です。 誰でも開発に参加できます.
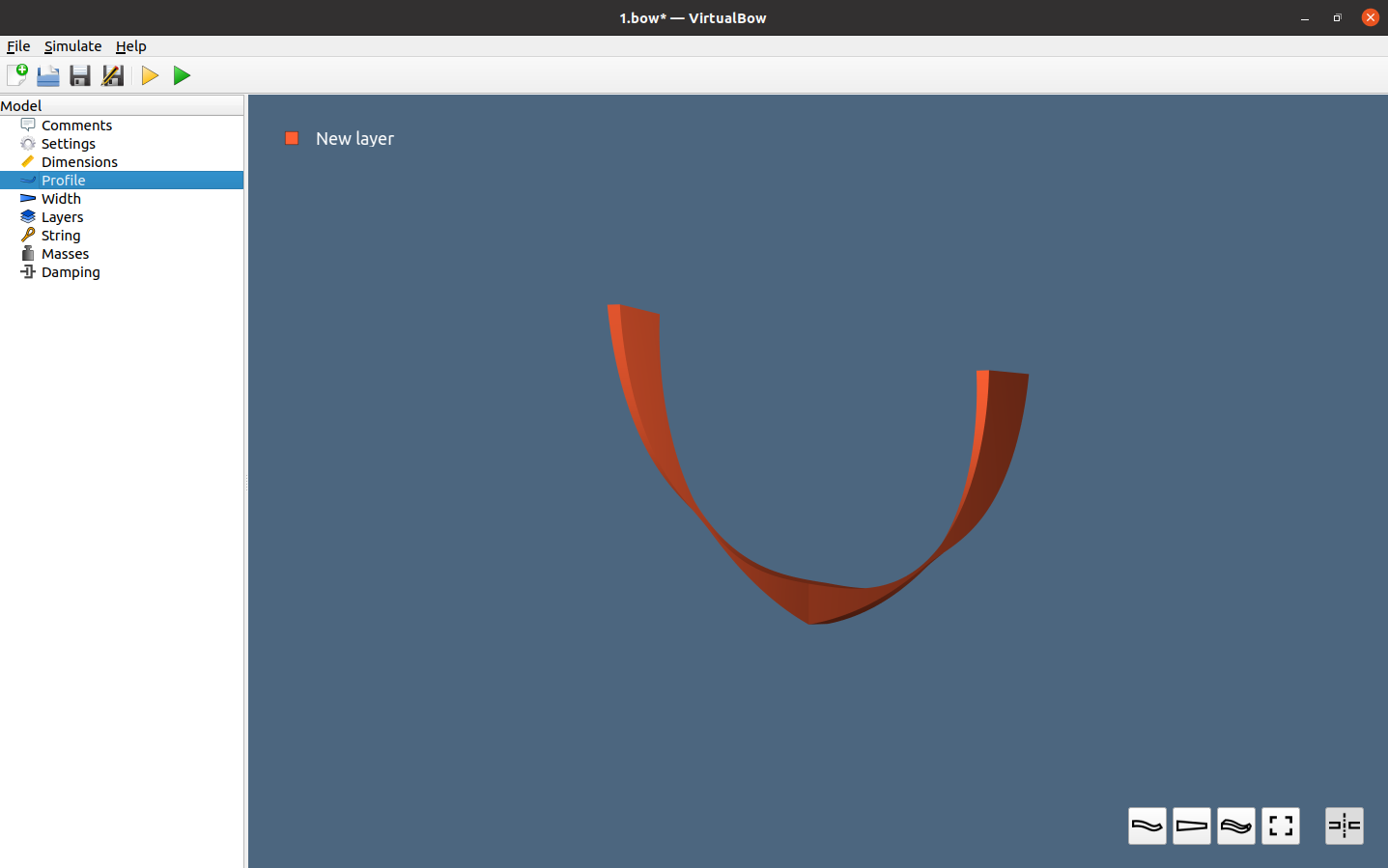
- プログラムには アークモデルを作成、ロード、保存できるモデルエディタ.
- できる レイヤー、マテリアルプロパティ、およびその他のパラメータを編集します.
- 私たちもできるようになります アークの静的およびダイナミクスのシミュレーションを実行します.
- を使用 有限要素法 (MEF)
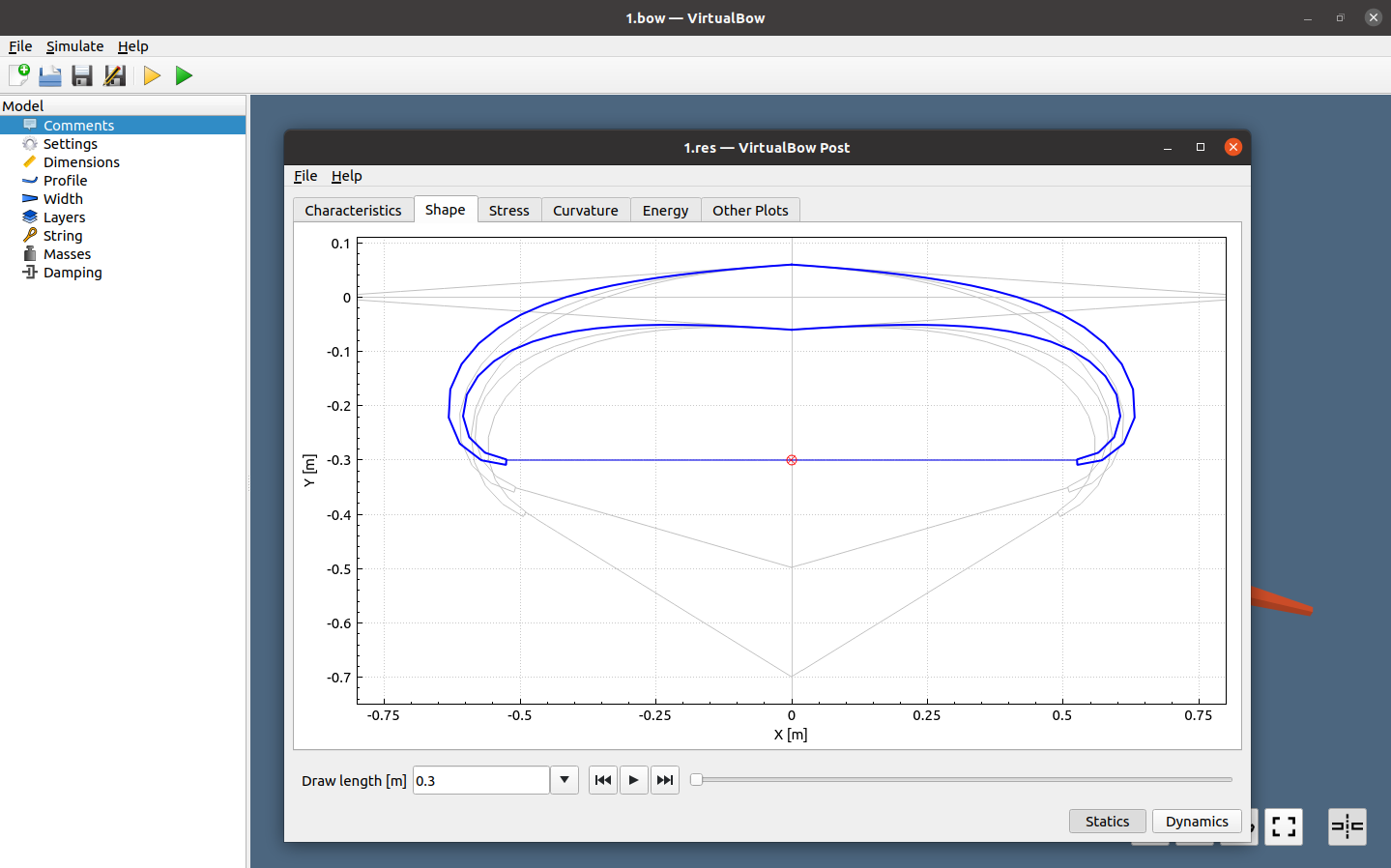
- を含む 結果ビューア 相談できる 静的な結果; 手足の形、曲線の描画、蓄積されたエネルギーまたは応力分布。 の中に 動的な結果 相談できます。 ロープと矢印の位置、速度と加速度、運動エネルギーと位置エネルギー、効率の程度、またはコマンドラインインターフェイス。
- の可能性があります コマンドラインからシミュレーションを実行する.
- できる 他のプログラム/スクリプトからVirtualBowを呼び出す パラメータの調査と設計の最適化を実行します。
- プログラムは完全に文書化されています。 ユーザーは相談する可能性があります ユーザーマニュアル、プログラムのすべての機能が説明されており、私たちが始めるのに役立ちます 理論マニュアル、内部シミュレーション方法の詳細なドキュメントを見つけることができます。
これらは、プログラムの機能のほんの一部です。 彼らはできます でそれらすべてを参照してください プロジェクトのウェブサイト.
UbuntuにVirtualBowをインストールする
VirtualBowは、Ubuntuのネイティブdebファイル形式として利用できます、で利用可能になります プロジェクトリリースページ GitHubで。 今日ダウンロードするファイルは«と呼ばれる必要がありますvirtualbow-0.7.1-linux64.deb ».
このプログラムの.debパッケージをダウンロードするには、Webブラウザーの使用に加えて、 ターミナルを開いて(Ctrl + Alt + T)、wgetを使用できます パッケージをダウンロードするには、次のようにします。
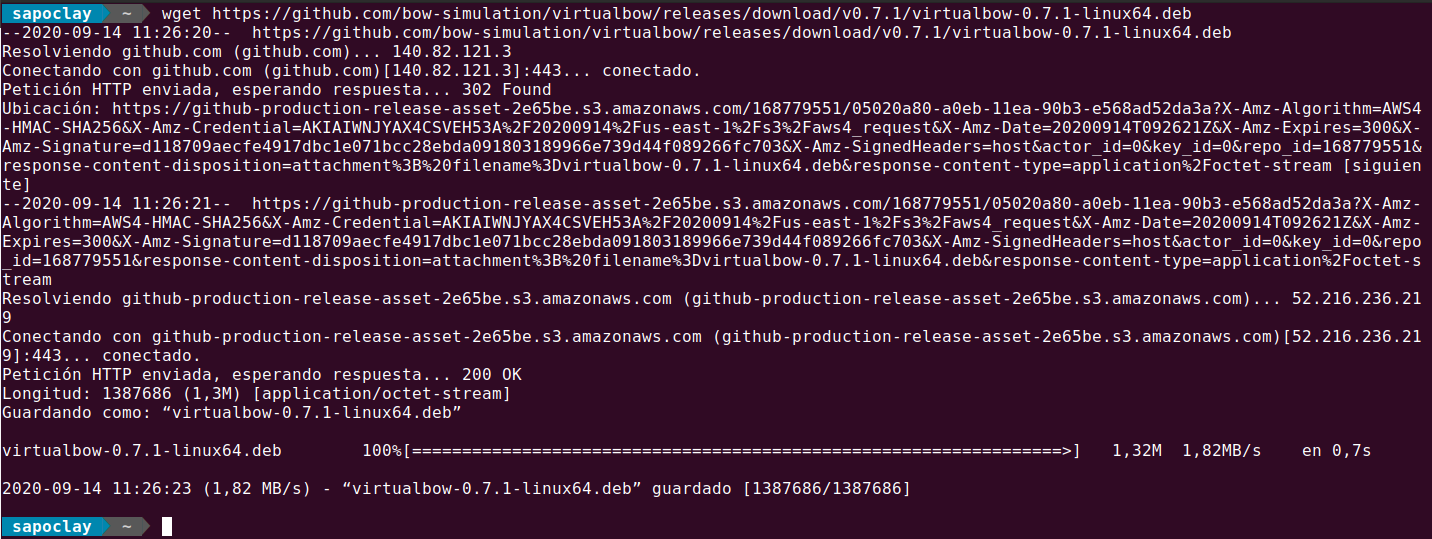
wget https://github.com/bow-simulation/virtualbow/releases/download/v0.7.1/virtualbow-0.7.1-linux64.deb
ダウンロードが完了したら、同じ端末から次のコマンドを実行します。 プログラムをインストールします:
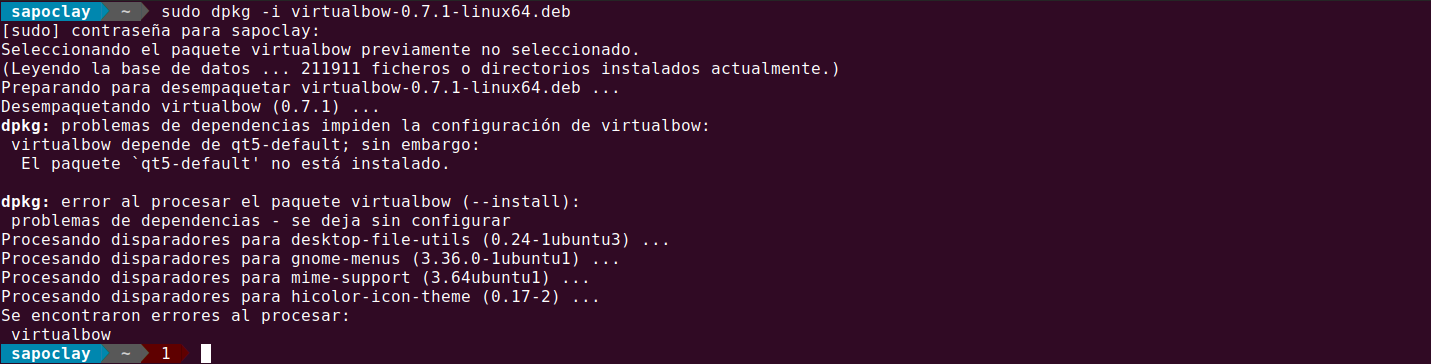
sudo dpkg -i virtualbow-0.7.1-linux64.deb
それらが表示された場合 依存関係の問題 前のスクリーンショットで見ることができるものとして、同じ端末にこの他のコマンドを入力することによってそれらを解決することができます:
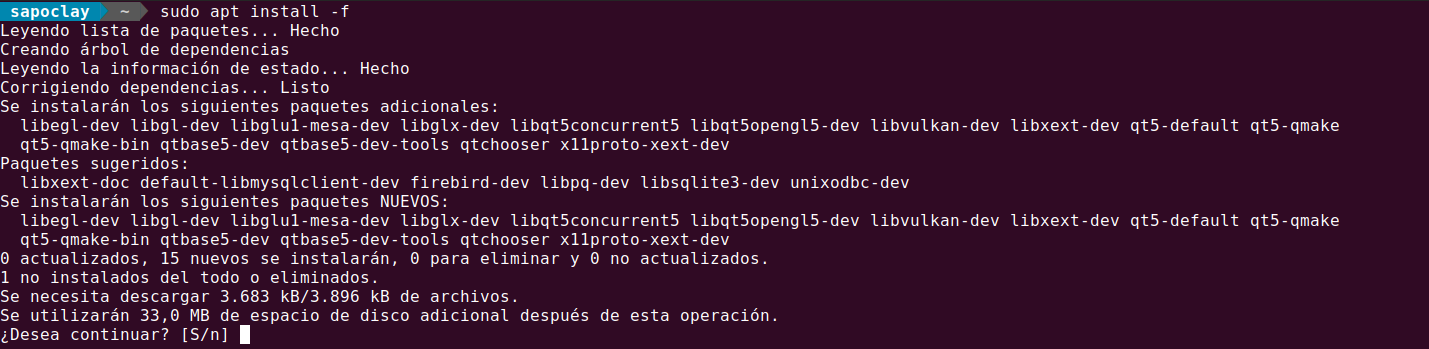
sudo apt install -f
インストールが完了したら、コンピューターでプログラムランチャーを検索してプログラムを開始できます。

アンインストール
へ このプログラムをチームから削除します、ターミナルを開いて(Ctrl + Alt + T)、次のコマンドを実行するだけです。

sudo apt remove virtualbow; sudo apt autoremove
プロジェクトの作成者は、シミュレーション結果の検証が非常に重要な問題であると警告しています。 したがって、このプログラムを使用して既存のアーチを設計またはモデル化した場合、 作成者は、シミュレーションと現実の相違点と類似点を知らせるように依頼します.
ウェブサイトはまた、材料の応力など、他の多くのシミュレーション結果を測定するのが難しいことを示しています。 したがって、 高度な測定機器を利用できる人(加速度センサー、高速度カメラなど。)このプロジェクトに大いに役立つでしょう.
彼らのウェブサイトでは、ユーザーがそれを考慮に入れる必要があることも示しています このソフトウェアはまだ未成熟なので、結果にあまり依存しないことをお勧めします、そして彼らは私たちが見つけたバグを報告するように私たちに勧めています。 プログラムの詳細については、ユーザーは プロジェクトのウェブサイト そこにあるドキュメント。