ในบทความถัดไปเราจะมาดูที่ CloudCompare นี่คือ 3D point cloud และซอฟต์แวร์ประมวลผลตาข่ายสามเหลี่ยม. วัตถุประสงค์ของแอปพลิเคชันนี้คือเพื่อทำการเปรียบเทียบระหว่างเมฆจุด 3 มิติที่มีความหนาแน่นสูงสองจุด เช่น เมฆที่ได้รับจากเครื่องสแกนเลเซอร์ นอกจากนี้ยังออกแบบมาเพื่อเปรียบเทียบ point cloud และตาข่ายสามเหลี่ยม ปัจจุบัน CloudCompare และ ccViewer ทำงานบนระบบ Gnu / Linux, Windows และ macOS โปรแกรมนี้เผยแพร่ภายใต้สัญญาอนุญาตสาธารณะทั่วไปของกนู (จีพี) ดังนั้นผู้ใช้จึงมีอิสระในการใช้งานเพื่อวัตถุประสงค์ใดก็ได้
จากการอัปเดต CloudCompare ได้กลายเป็น ซอฟต์แวร์ประมวลผลแบบ point cloud ทั่วไป รวมถึงอัลกอริธึมขั้นสูงมากมาย ชอบ: rการบันทึก การสุ่มตัวอย่าง การจัดการฟิลด์สี / ปกติ / สเกลาร์ การคำนวณทางสถิติ การจัดการเซ็นเซอร์ การกำหนดเป้าหมายแบบโต้ตอบหรืออัตโนมัติ การปรับปรุงการแสดงภาพ และอีกมากมาย
โปรแกรมนี้สร้างขึ้นจากความร่วมมือระหว่าง Telecom ParisTech และแผนก R&D ของ EDF โครงการ CloudCompare เริ่มต้นในปี 2003 โดยมีปริญญาเอกด้านการตรวจจับการเปลี่ยนแปลงในข้อมูลเรขาคณิต 3 มิติของ Daniel Girardeau-Montaut ในขณะนั้น จุดประสงค์หลักคือการตรวจจับการเปลี่ยนแปลงอย่างรวดเร็วของเมฆแบบจุด 3 มิติที่มีความหนาแน่นสูงซึ่งได้มาจากเครื่องสแกนเลเซอร์ที่โรงงานอุตสาหกรรมหรือสถานที่ก่อสร้าง ต่อมาได้พัฒนาเป็นซอฟต์แวร์ประมวลผลข้อมูล 3 มิติทั่วไปและขั้นสูง ตอนนี้ เป็นโครงการโอเพ่นซอร์สแบบสแตนด์อโลนและซอฟต์แวร์ฟรี.
คุณสมบัติทั่วไปของ CloudCompare

- CloudCompare ให้บริการ ชุดเครื่องมือพื้นฐานสำหรับการแก้ไขและเรนเดอร์ 3D point clouds และตาข่ายสามเหลี่ยมด้วยตนเอง. นอกจากนี้ยังมีอัลกอริธึมการประมวลผลขั้นสูงหลายแบบ รวมถึงวิธีการดำเนินการ:
-
- ประมาณการ (ขึ้นอยู่กับแกนคลี่, กระบอกสูบหรือกรวย, ...)
- บันทึก (ไอซีพี, ...)
- การคำนวณระยะทาง (cloud-cloud หรือ cloud-mesh ระยะห่างจากเพื่อนบ้านที่ใกล้ที่สุด ...)
- การคำนวณทางสถิติ (การทดสอบเชิงพื้นที่ ไคสแควร์, ...)
- การแบ่งส่วน (การติดฉลากส่วนประกอบที่เชื่อมต่อตามการขยายพันธุ์ไปข้างหน้า ...)
- การประมาณลักษณะทางเรขาคณิต (ความหนาแน่น, ความโค้ง, ความหยาบ, การวางแนวของระนาบทางธรณีวิทยา, ...)
- CloudCompare สามารถจัดการฟิลด์สเกลาร์ไม่จำกัดต่อจุดบนคลาวด์ ซึ่งอัลกอริธึมเฉพาะต่างๆ สามารถนำมาใช้ได้ (การปรับให้เรียบ การประเมินการไล่ระดับสี สถิติ ฯลฯ). ระบบการสร้างสีแบบไดนามิกช่วยให้ผู้ใช้สามารถมองเห็นฟิลด์สเกลาร์ต่อจุดได้อย่างมีประสิทธิภาพ
- ผู้ใช้จะสามารถแบ่งส่วนเอนทิตี 3 มิติแบบโต้ตอบได้ (ด้วยการวาดเส้น 2D บนหน้าจอ) หมุนเวียน / แปลเอนทิตีหนึ่งหรือหลายรายการที่เกี่ยวข้องกับส่วนอื่น ๆ โต้ตอบ เลือกจุดเดียวหรือคู่ของจุดแบบโต้ตอบ (เพื่อให้ได้ความยาวของส่วนที่สอดคล้องกัน) หรือทริปเปิ้ลจุด (เพื่อให้ได้มุมและระนาบที่สอดคล้องกับสภาวะปกติ). เวอร์ชันล่าสุดยังรองรับการสร้างป้ายกำกับ 2D ที่แนบกับจุดหรือคำอธิบายประกอบของพื้นที่สี่เหลี่ยม
- กลไกปลั๊กอินช่วยขยายขีดความสามารถของ CloudCompare เพิ่มเติม
ติดตั้ง CloudCompare บน Ubuntu
ในการติดตั้ง CloudCompare บน Ubuntu ผู้ใช้สามารถใช้แพ็คเกจ Flatpak ที่สามารถพบได้ใน ฮับแบน. หากคุณใช้ Ubuntu 20.04 และยังไม่ได้เปิดใช้งานเทคโนโลยีนี้ในระบบของคุณ คุณสามารถดำเนินการต่อ คู่มือ ที่เพื่อนร่วมงานเขียนไว้ในบล็อกนี้เมื่อสักครู่
เมื่อคุณสามารถติดตั้งแอปพลิเคชันประเภทนี้บนคอมพิวเตอร์ของคุณได้ คุณจะต้องเปิดเทอร์มินัล (Ctrl + Alt + T) และเรียกใช้สิ่งต่อไปนี้ ติดตั้งคำสั่ง:
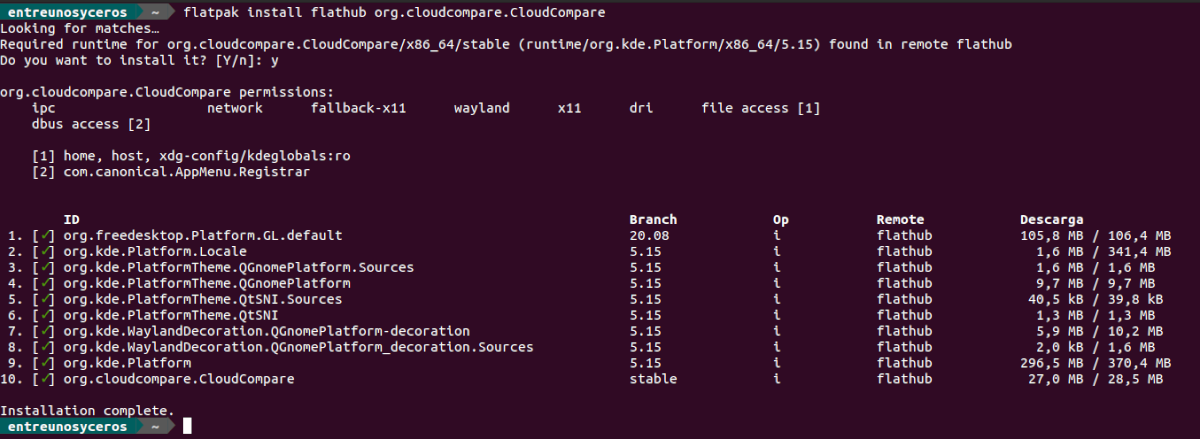
flatpak install flathub org.cloudcompare.CloudCompare
เมื่อการติดตั้งเสร็จสมบูรณ์ คุณสามารถ เริ่มโปรแกรม มองหาตัวเรียกใช้งานที่เกี่ยวข้องบนคอมพิวเตอร์ของเรา แม้ว่าคำสั่งสามารถเขียนในเทอร์มินัลได้เช่นกัน:

flatpak run org.cloudcompare.CloudCompare
ถอนการติดตั้ง
ไปยัง ลบโปรแกรมนี้จำเป็นต้องเปิดเทอร์มินัลเท่านั้น (Ctrl + Alt + T) และดำเนินการคำสั่งต่อไปนี้ในนั้น:

flatpak uninstall org.cloudcompare.CloudCompare
CloudCompare เป็นซอฟต์แวร์ฟรี (แม้ว่าจะไม่จำเป็นต้องจ่ายค่าซอฟต์แวร์ แต่นักพัฒนายินดีรับเงินบริจาคจากผู้ใช้ที่เห็นว่ามีประโยชน์). สำหรับคำถาม รายงานข้อผิดพลาด หรือข้อเสนอแนะ ผู้ใช้สามารถ ตรวจสอบ ฟอรัมโครงการ, ที่เก็บของที่ Github หรือ เว็บไซต์โครงการ.